首先,欢迎各位访问Engineering工作室的官网。我们工作室专注于中高等教育阶段的机器人教育,内容覆盖从初中衔接课程到大学本科阶段。
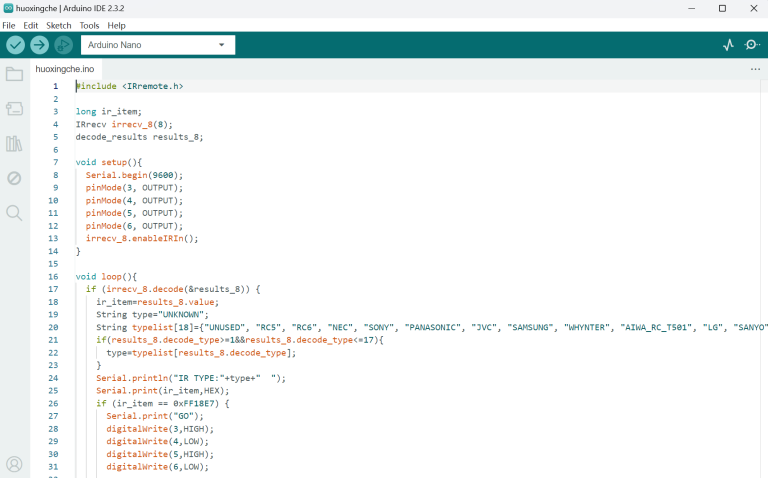
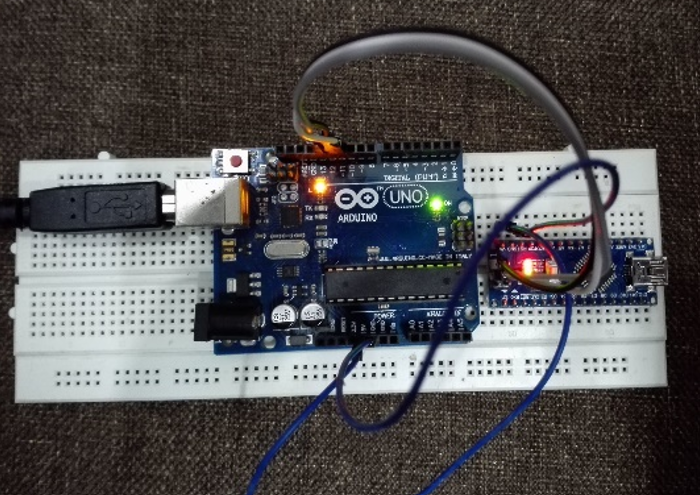
我们的网站精心划分为四大板块。其中,核心板块是学习交流社区。在这里,我将定期与大家分享工程学的学习方法、学习心得,并推荐一些优质课程,这些课程的教育水平主要针对大学本科阶段。我会引导大家从本科入学阶段的衔接课程开始,比如arduino单片机和solid works三维绘图,AltiumDesigner电路绘图等工具性的基础学习。在完成上述工具性内容的学习后,大家将进入理论层面的深入探索。这一阶段将涵盖理论力学、材料力学、平面机械原理、机械设计、模拟电子、数字电子、电工学以及机器人学概论,机电控制原理等课程。为了深入理解这些理论,大家需要投入大量时间阅读文献和教材。然而,这一部分的学习确实需要耐心,因为大部分时间会花费在按照课本内容学习、编写代码和记忆基本机械结构上,而需要动手实践的部分相对较少。为了缓解这种学习压力并激发学习兴趣,我建议大家在这一阶段可以浏览网站上的开源项目板块。在那里,你可以找到一些创意性小制作,这些项目不需要过多的理论知识,却能提升你的动手能力,并帮助你度过这个相对枯燥的学习阶段。随着时间的推移,我们将逐步深化学习,进一步探索如ROS、OpenCV,simulink等深度学习的机器人操作系统或视觉识别系统。一旦接触到这一阶段,便意味着已经迈入了机器人学的广阔天地。然而,真正的进步和成就,还需依赖于个人的潜力和不断的自我探索。完成这些核心课程的学习,通常需要两到三年的时间,这恰好是本科阶段的学习周期。因此,我们承诺学习交流社区板块第一轮内容将持续更新至少三年,以确保学习者能够获取到所有关键的学习资源和内容。未来,我们将继续拓展更新内容,特别是聚焦于机器人的深度学习和AI应用,以紧跟行业前沿,满足学习者对新技术、新知识的渴求。
为了保持内容的时效性和互动性,我计划每月至少更新两次这个板块的内容。同时,我也会在这里分享我在项目中遇到的一些技术挑战,期待大家共同参与,共同解决。
第二个板块是开源项目区。这个板块主要展示我制作的一些项目,它们适合所有教育阶段的同学们去了解和学习。在这里,我会发布一些需要强大理论体系支撑的开源项目,比如FoC闭环控制器和基于OpenCV开发的视觉识别步进电机机械臂等。这些项目主要面向目前在校的大学生,旨在通过项目硬件与理论知识的结合,帮助他们巩固学习成果,并鼓励大家进行二次开发,例如用于毕业设计。
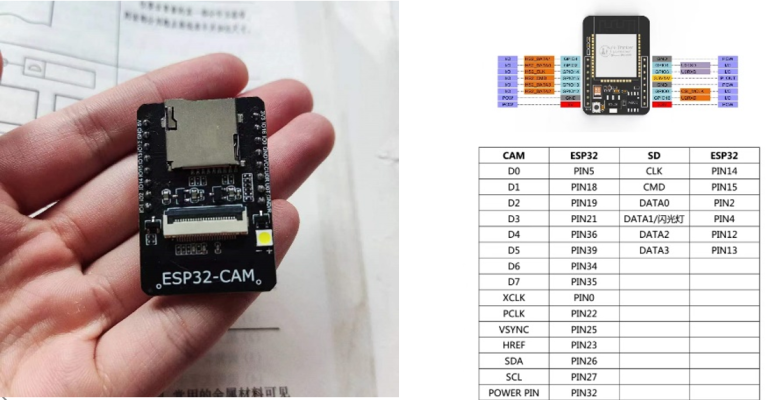
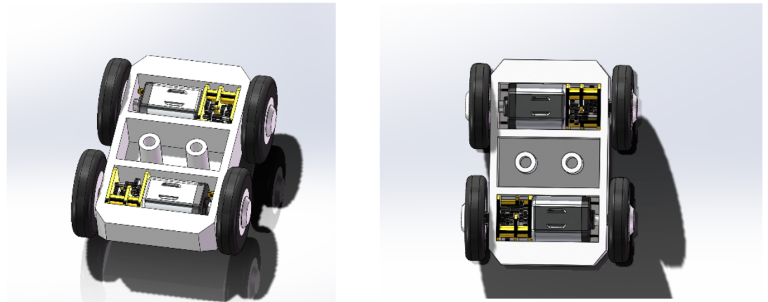
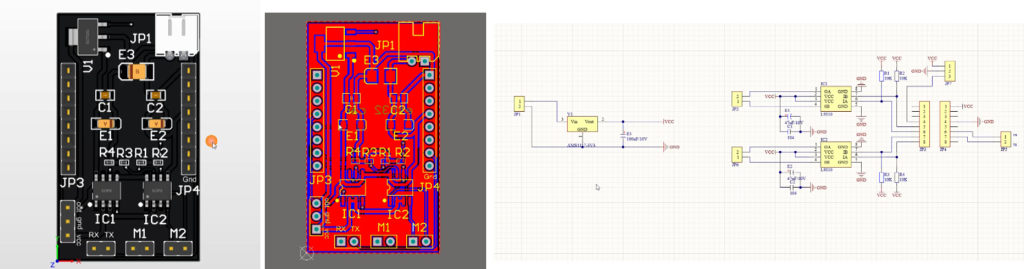
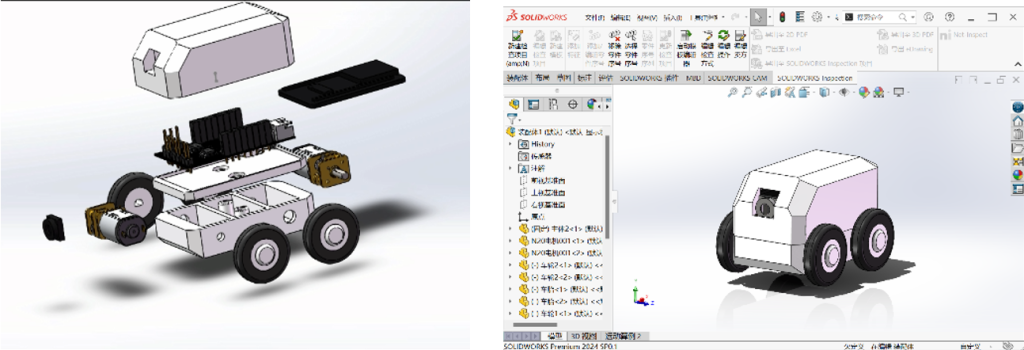
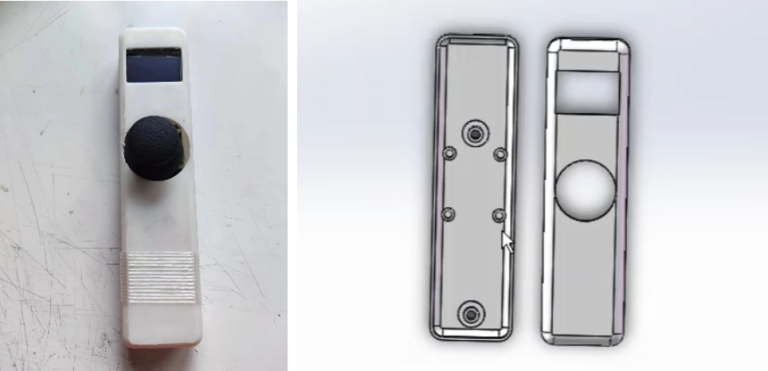
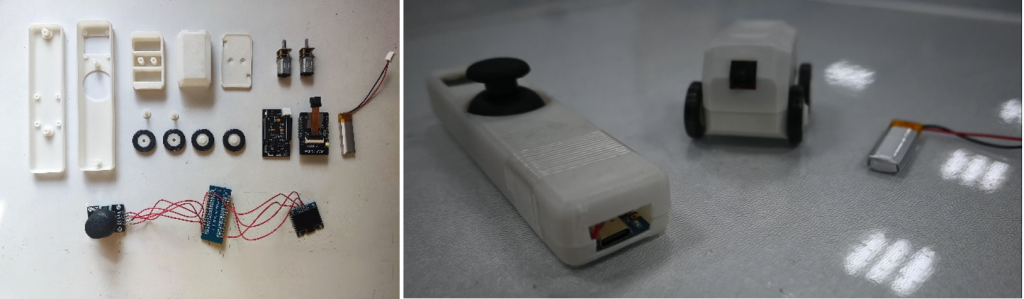
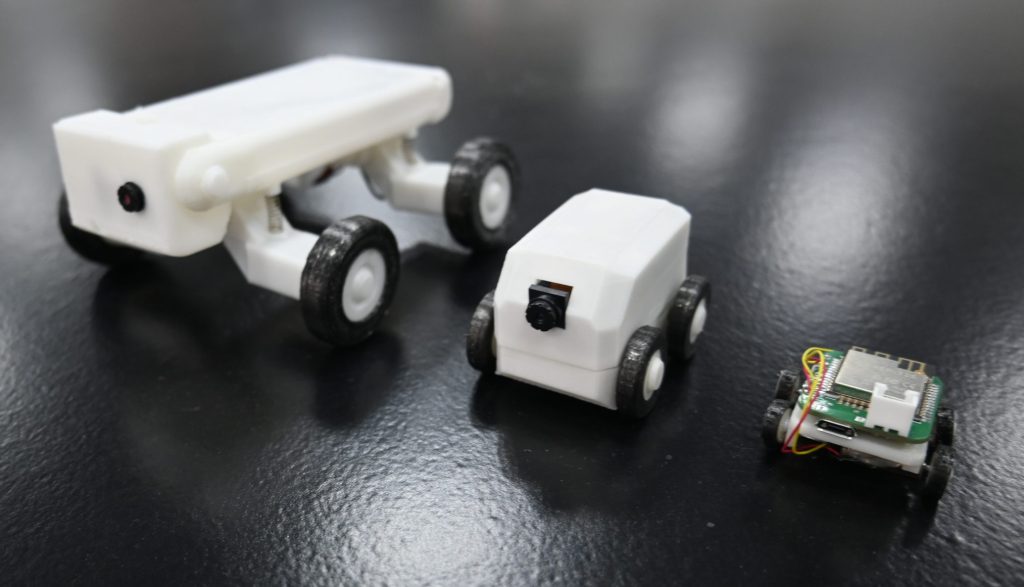
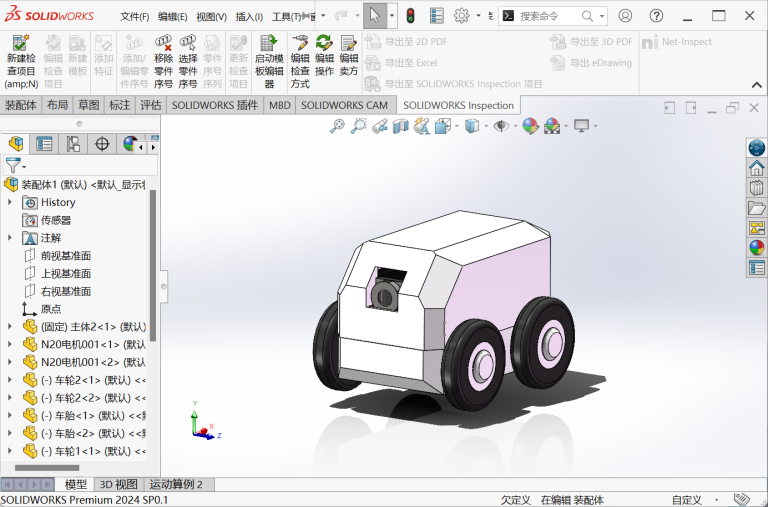
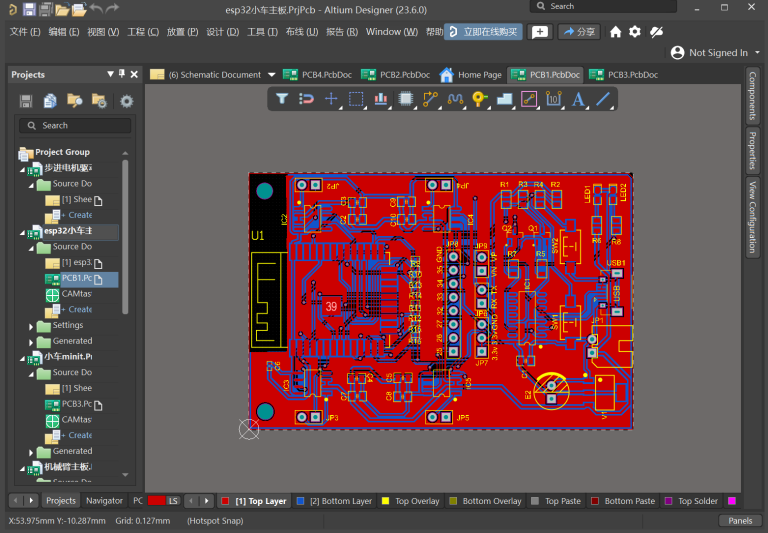
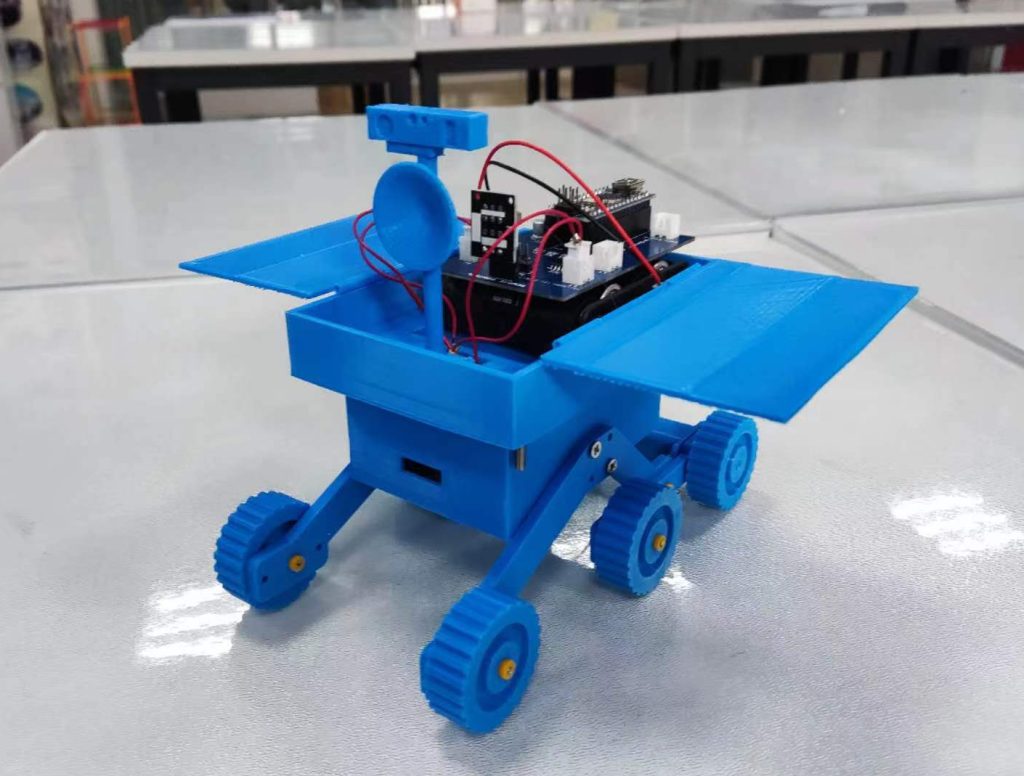
同时,这个板块也会发布一些创意性小制作,如ESP32智能车和使用舵机为驱动的四足机器人等。这些项目都经过了我的二级封装或完整的硬件产品化,使得即便你只需要会Scratch这类模块化编程,初中阶段的电路基础知识,一点点的平面机械原理,也能轻松完成。这些创意小制作的目的是激发大家对机器人学和工程学的兴趣,因为纯粹的理论学习确实可能让人感到吃力,尤其是考虑到内容的丰富性和难度。
这一板块面向广泛的学习者,无论是大学生还是中学生,都值得点进来探索一番,尝试亲自动手实践。对于大学生而言,这里提供了一个绝佳的实践机会,有助于提升学习兴趣并深化理论知识的理解。而对于中学生,这则是一次宝贵的课外实践经历,不仅能够培养兴趣,还能为未来专业课程的学习提前规划方向。
第三个板块是Steam教育课程,这一板块专门针对初高中阶段的学生,同时也提供给科技教育机构、社团以及学校科技性夏令营。我们精心打造的Steam教育课程系统完备且严谨,不仅涵盖了科学、技术、工程、艺术和数学等多个领域,更融合了前沿科技与创新教育理念。值得一提的是,我们拥有这些课程的全部版权,确保了学生和机构们能够独家体验到我们的优质课程。
我们Steam教育课程的最大特点和优势在于我们提供的极其有创意且性能卓越的硬件支持。这些硬件不仅为学生提供了实践操作的平台,更激发了他们探索未知、创新实践的欲望。我们深知,在科技教育中,硬件的支持至关重要,因此我们不断投入研发,力求为学生提供最先进、最实用的学习工具。
在教学方法上,我们始终坚持以项目式学习、探究性学习为核心指导思想进行课程安排。通过引导学生参与实际项目,让他们在实践中学习、在探究中成长。我们鼓励学生发挥主观能动性,培养他们的创新思维和解决问题的能力。同时,我们也注重团队合作与沟通能力的培养,让学生在与他人合作中学会倾听、理解和尊重。
总之,我们的Steam教育课程致力于为学生提供一种全新的学习体验,让他们在科技的海洋中畅游,探索未知的世界。我们相信,通过我们的努力和学生的积极参与,一定能够培养出更多具有创新精神和实践能力的优秀人才。
最后一个板块是“科技好物市场”,尽管目前这一板块仍处于紧张的筹备阶段,距离正式上线还有一段时间。但我们坚信,这一板块的推出将为广大机器人学爱好者带来极大的便利和惊喜。
设立“科技好物市场”的初衷,源于我们深刻认识到,在机器人学的学习过程中,控制学是至关重要的一环,它要求学习者投入大量的精力和时间去深入理解与实践。而为了更好地掌握控制学的精髓,学习者往往需要借助一些高质量的硬件来辅助学习,进行实地操作和实验。
因此,我们精心策划了“科技好物市场”这一板块,旨在为学习者提供一系列优质的硬件产品,这些产品不仅性能卓越、质量可靠,而且与机器人学和控制学的课程内容紧密相关。我们相信,通过这一板块,学习者能够更加方便地找到适合自己学习需求的硬件产品,从而更高效地掌握机器人学的知识和技能。总之,“科技好物市场”的推出,将为广大机器人学爱好者提供一个更加便捷、高效的学习平台,让每一位学习者都能够在机器人学的道路上走得更远、更稳。
读到这里,我深信在座的每一位都是对机器人和工程学怀有无限热爱的朋友。你们对知识的渴望和对技术的追求,正是我们网站存在并不断发展的核心动力。在此,我再次向你们表示热烈的欢迎!我们的网站是一个专为机器人和工程学爱好者精心打造的交流平台,致力于分享最新的行业动态、技术教程和项目案例,为大家提供一个互相学习、交流和成长的空间。
当然,我们也非常期待与各位有志之士展开合作。如果你对我们的网站感兴趣,或者有任何合作项目想要探讨,欢迎点击这里与我们取得联系。我们期待与你的合作,共同推动机器人和工程学领域的发展。
最后,我要衷心感谢每一位朋友的支持和关注。你们的参与是我们网站不断前进的动力源泉。我们坚信,在大家的共同努力下,我们的网站将成为机器人和工程学领域最具影响力和价值的交流平台。让我们携手并进,共同创造美好的未来!