Pro max版本的小说可以说是基础版的全面升级。其中最直观的体现就是它的体积上的扩大,以及从一块mcu升级为两块。最大的升级是使用了2个espS芯片分别进行视频采集与小车运动的控制。这样拥有了足够的缓存以及运算算力,可以完成更多的智能识别的任务。大大提高小车的可玩性。
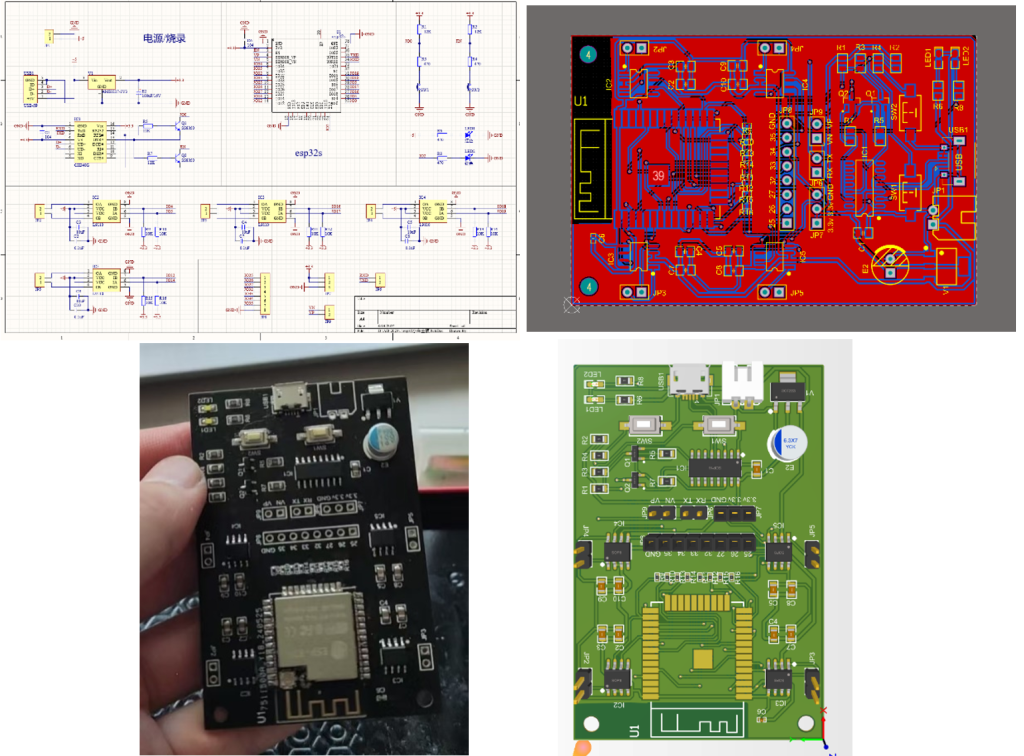
下图这块主板是作为小车动力控制使用的,使用的处理器是一块儿esp 32s,并且板载了4颗L1190s用于驱动4颗电机运转。并且提前预留了一组串口接口,I2c接口,以及4个io接口。其中预留的这一组串口主要是用于和用于视频录像的那块儿Esp 32板卡进行联络通讯使用。Io接口可以连接更多的传感器,例如温度,外等传感器可以进一步扩展小车的功能,让这个系列的小车真正实现智能化。其中还有一个io口用于连接驱动摄像模块儿俯仰的舵机使用。当然在设计这个主板的时候一定不要忘记与各个模块之间要提前预留好共同连接地线的接口。
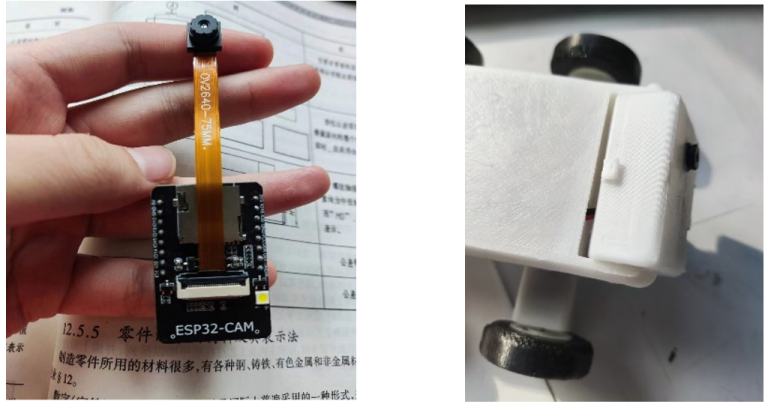
另外一块儿用于视频拍摄的板卡就是基础版里面出现的esp 32cam,他与主板间就是使用一组串口进行通讯的,当然这块esp32cam也是共用上面那块儿主板的电源。
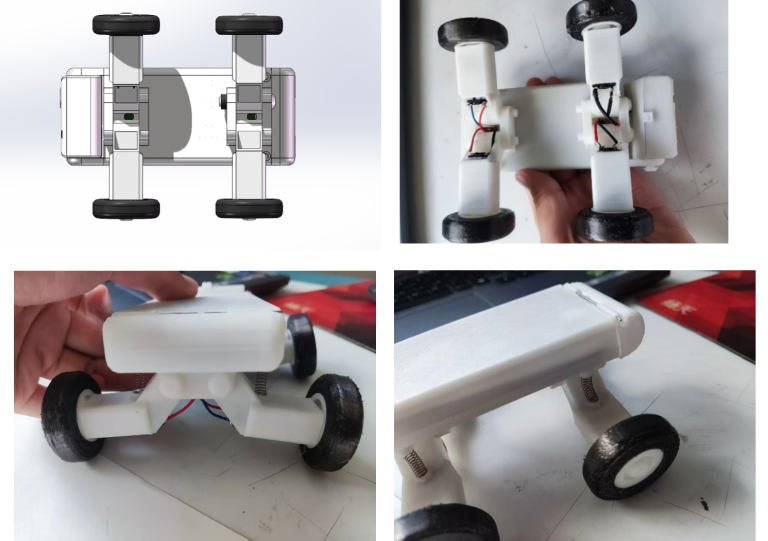
当然除了小车最核心的控制系统以外其他部分的硬件也有所提升了,比如说升级了4马达驱动。全车的弹簧减震。可变角度的摄像头。
这些硬件的上升也使得小车比较标准版拥有更好的操作体验,以及更流畅的移动,悬挂以及驱动力的面升级也使得小车拥有了更好的灵活性以及越障能力。
硬件部分到这里就结束了,下面我们再来聊一下它的控制程序。
针对这辆小车的控制方式也是涉及了两种,第一个就是与采用esp now通讯这部分的程序和基础版的几乎上是一样的,只不过是把视频传输和移动控制的两部分程序分别传给两块板卡(具体传送哪一个,程序中有标明),另一种方式就是在标准版里提到过的建一个APP,使用udp通讯。如果建立一个APP,在这里面我们主要用的是APP inventor这款软件,它是由美国谷歌公司所研发的一款图形化APP制作软件,在这个项目当中我们只用其中的几个功能,一个是Udp通讯。但其实原版本的APP inventor中并没有包含udp通信模块儿,所以需要我们从工坊里面下载,之后在控制方式里面,我们可以采用虚拟摇杆或者是虚拟按键的方式进行控制小车的前后左右移动。我在这个项目里面使用的最简单的虚拟按键的操作方式,按动对应的按钮,小车就会执行相应的动作。视频传输方面就是需要加一个网页浏览器窗口,从这个网页浏览器直接读取传输过来的视频流。
网址需要填入自己小车使用的esp32cam所对应的网址。并根据小车实际运动方向修改发送的字符。