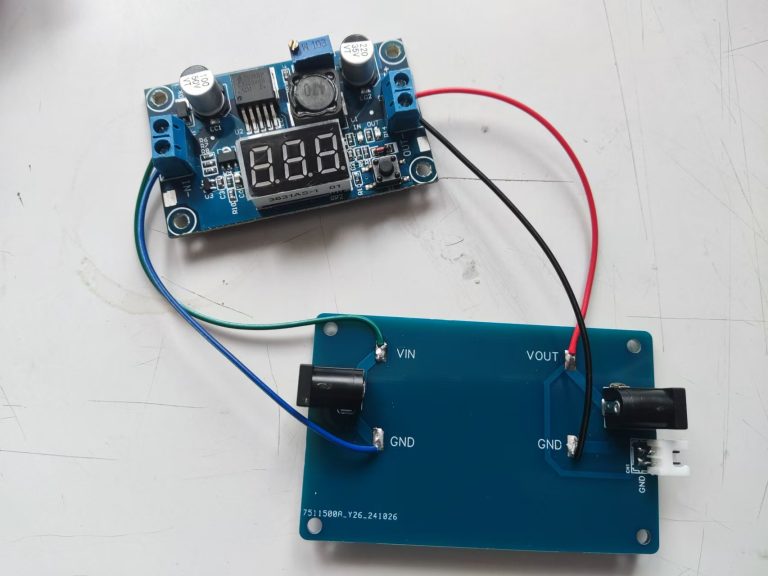
27 12 月 2024 engineeringlab06 0 评论 低功率可调降压盒 低功率可调降压盒 HOME 在从事电子研发和测试的日子里,不知道大家有没有和我一样曾无数次面对过这样一个问题:桌面上摆满了各种变压模块,线路交错,杂乱无章,不仅影响了工作效率,更增加了电路测试的风险。每当需要为某个电路模块提供特定电压时,我总得在那一堆变压模块中翻找、连接,这个过程既繁琐又容易出错。针对这一问题,我利用现有的降压模块设计了一款低功率迷你降压盒。这款降压盒的出现,使得我们在进行电路测试时无需再使用大量的导线来连接和转接电源适配器,只需两端连接标准接线端子即可,为桌面级产品或小制作的电路测试带来了更大的便利。 其实这个降压盒的结构我可以说是非常简单,一共就由4大部分组成,一块儿淘宝上十来块钱就可以买到的DC直流降稳压可调模块儿,一块儿接口整合板,盒体外壳,还有一个弱电范围内的电源适配器。 DC降稳压可调模块,网上可以说是一搜一大把,我选用的就是最常见的一款型号是 嗯,这款的最大承载电流是三安左右,可调范围1.25-35V,基本上可以满足绝大部分的使用场景了,如果想让这个降稳压模块儿可以完全发挥它的调节范围,那么就可以选择一个36V的电源适配器。 因为这个迷你减压盒最大的作用就是为了减少因为不同电源接口,端子的种类不同所带来复杂的接线环节,所以在变压盒的两端都设置了多种接口,两端都支持DC电源接口,2.54接线端子等多种接口。 外壳部分的设计都更为简洁了,基本上都是卡着两块儿板子的尺寸来设计的,也是为了省事儿,甚至连盖板都没有画。在变压旋钮这部分因为外壳与降稳压模块儿的距离有点儿远,所以需要使用一根儿5mm左右的轴来连接一下两端点,用302胶水分别粘在模块儿的限位器旋钮上以及外部旋钮上。 下载全部
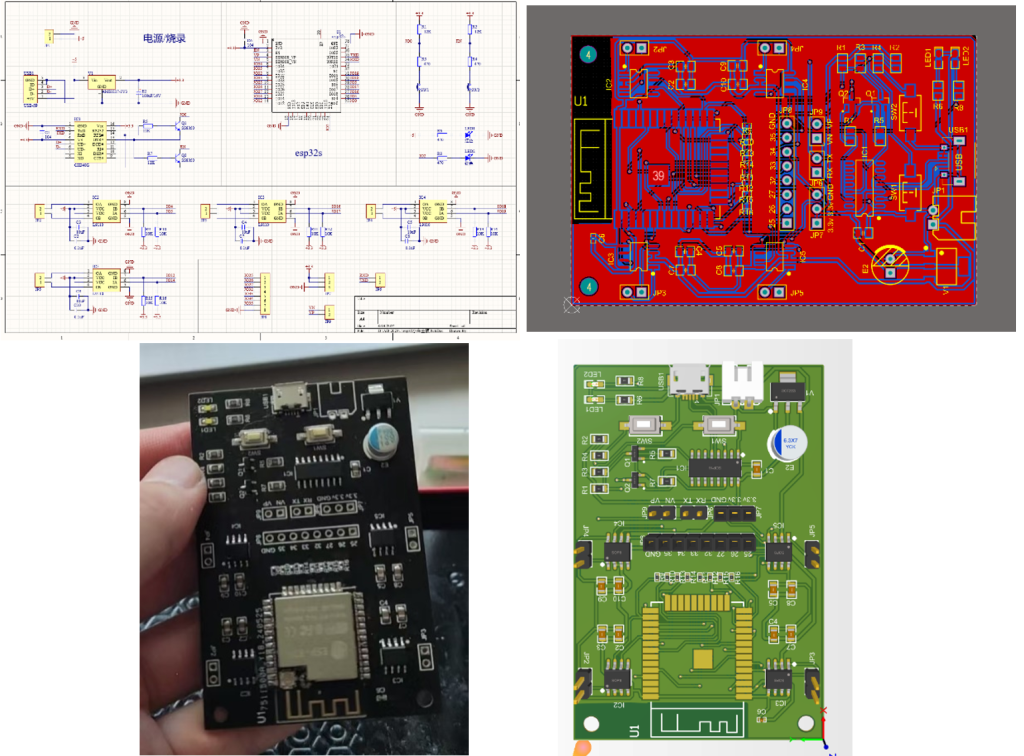
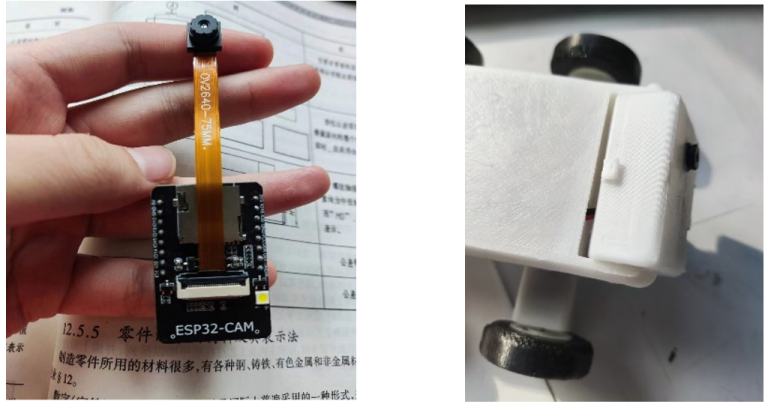
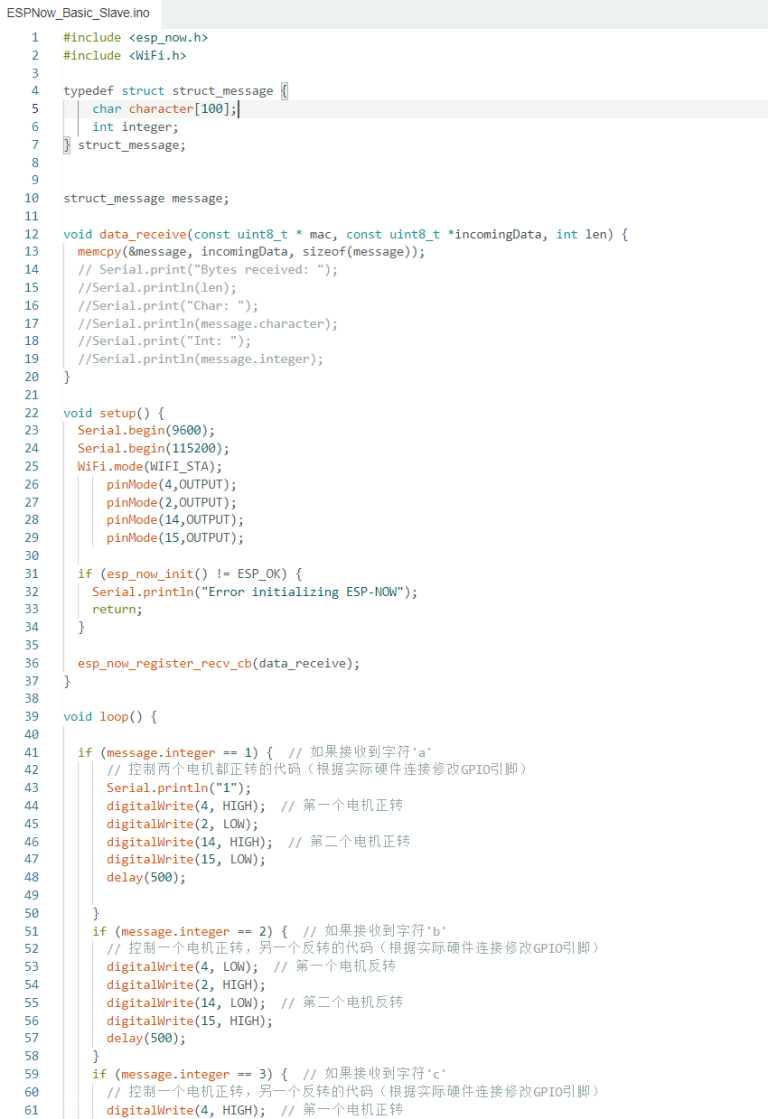
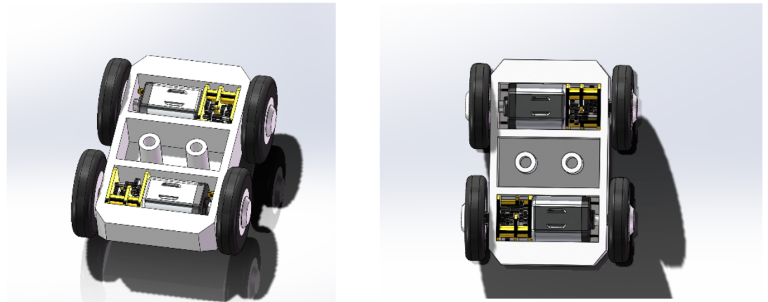
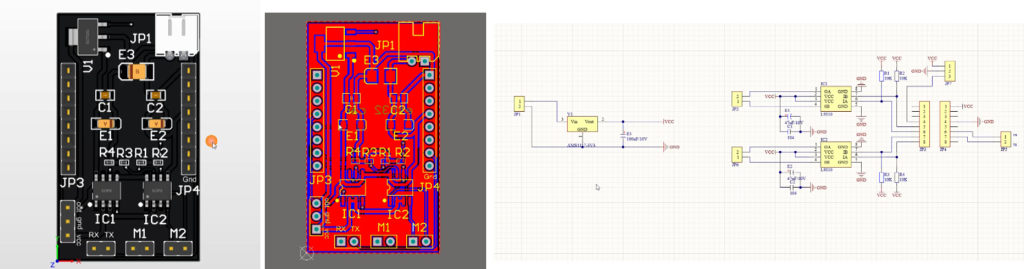
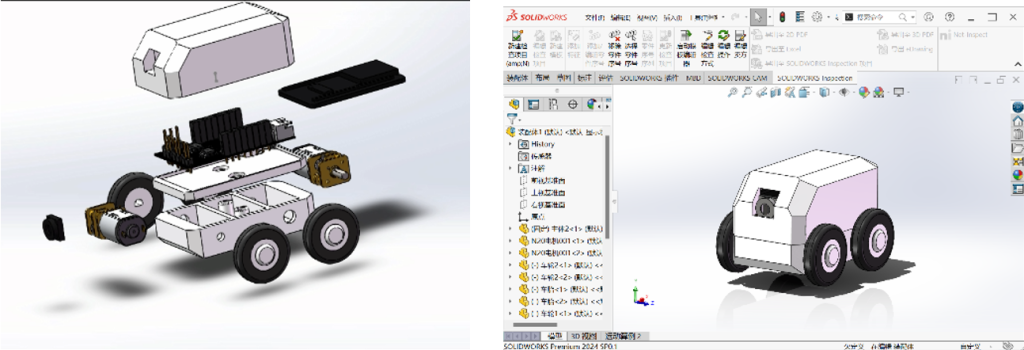
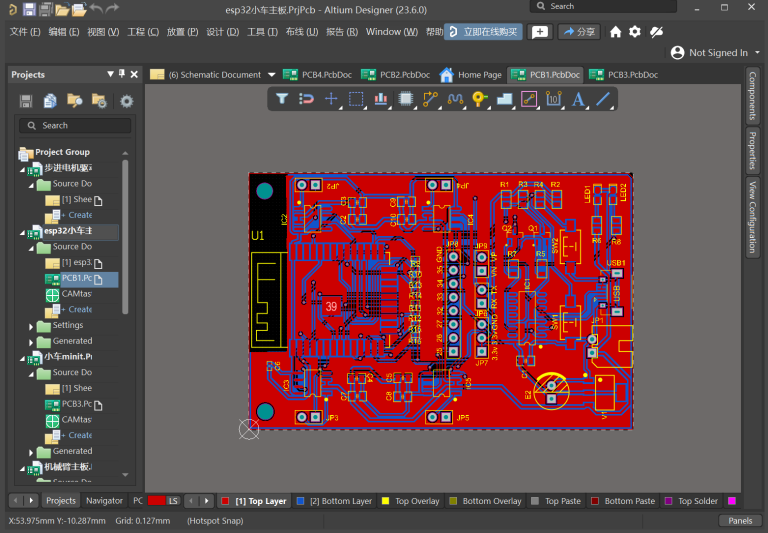
26 9 月 2024 engineeringlab06 0 评论 esp小车3 esp32智能车系列4(Pro Max款) Pro max版本的小说可以说是基础版的全面升级。其中最直观的体现就是它的体积上的扩大,以及从一块mcu升级为两块。最大的升级是使用了2个espS芯片分别进行视频采集与小车运动的控制。这样拥有了足够的缓存以及运算算力,可以完成更多的智能识别的任务。大大提高小车的可玩性。 下图这块主板是作为小车动力控制使用的,使用的处理器是一块儿esp 32s,并且板载了4颗L1190s用于驱动4颗电机运转。并且提前预留了一组串口接口,I2c接口,以及4个io接口。其中预留的这一组串口主要是用于和用于视频录像的那块儿Esp 32板卡进行联络通讯使用。Io接口可以连接更多的传感器,例如温度,外等传感器可以进一步扩展小车的功能,让这个系列的小车真正实现智能化。其中还有一个io口用于连接驱动摄像模块儿俯仰的舵机使用。当然在设计这个主板的时候一定不要忘记与各个模块之间要提前预留好共同连接地线的接口。 另外一块儿用于视频拍摄的板卡就是基础版里面出现的esp 32cam,他与主板间就是使用一组串口进行通讯的,当然这块esp32cam也是共用上面那块儿主板的电源。 当然除了小车最核心的控制系统以外其他部分的硬件也有所提升了,比如说升级了4马达驱动。全车的弹簧减震。可变角度的摄像头。 这些硬件的上升也使得小车比较标准版拥有更好的操作体验,以及更流畅的移动,悬挂以及驱动力的面升级也使得小车拥有了更好的灵活性以及越障能力。硬件部分到这里就结束了,下面我们再来聊一下它的控制程序。针对这辆小车的控制方式也是涉及了两种,第一个就是与采用esp now通讯这部分的程序和基础版的几乎上是一样的,只不过是把视频传输和移动控制的两部分程序分别传给两块板卡(具体传送哪一个,程序中有标明),另一种方式就是在标准版里提到过的建一个APP,使用udp通讯。如果建立一个APP,在这里面我们主要用的是APP inventor这款软件,它是由美国谷歌公司所研发的一款图形化APP制作软件,在这个项目当中我们只用其中的几个功能,一个是Udp通讯。但其实原版本的APP inventor中并没有包含udp通信模块儿,所以需要我们从工坊里面下载,之后在控制方式里面,我们可以采用虚拟摇杆或者是虚拟按键的方式进行控制小车的前后左右移动。我在这个项目里面使用的最简单的虚拟按键的操作方式,按动对应的按钮,小车就会执行相应的动作。视频传输方面就是需要加一个网页浏览器窗口,从这个网页浏览器直接读取传输过来的视频流。 网址需要填入自己小车使用的esp32cam所对应的网址。并根据小车实际运动方向修改发送的字符。 下载资料
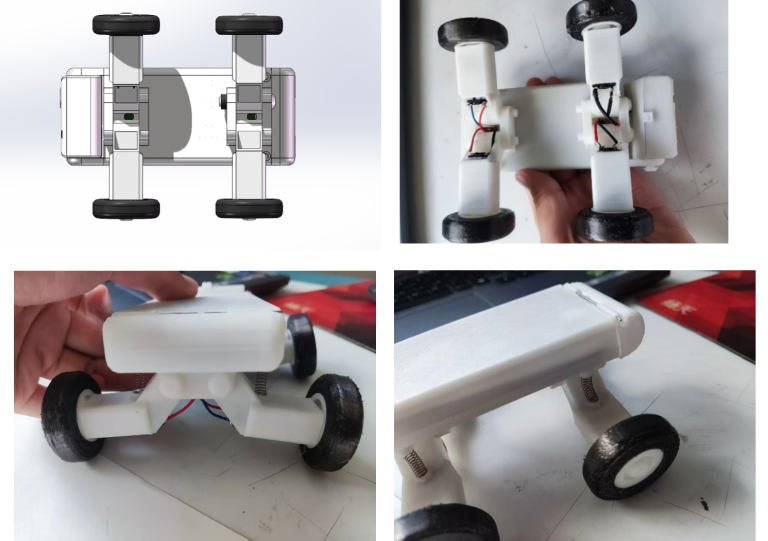
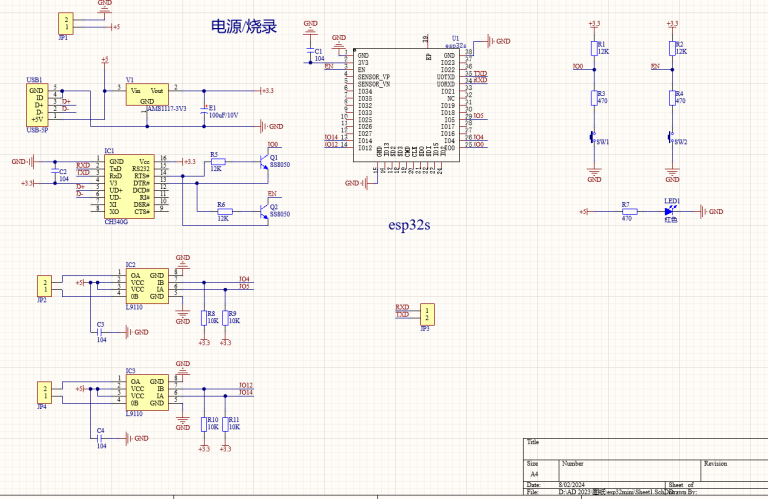
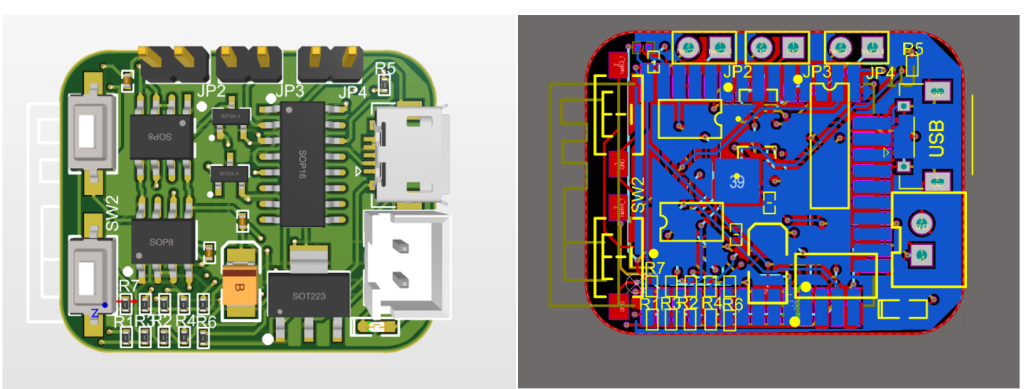
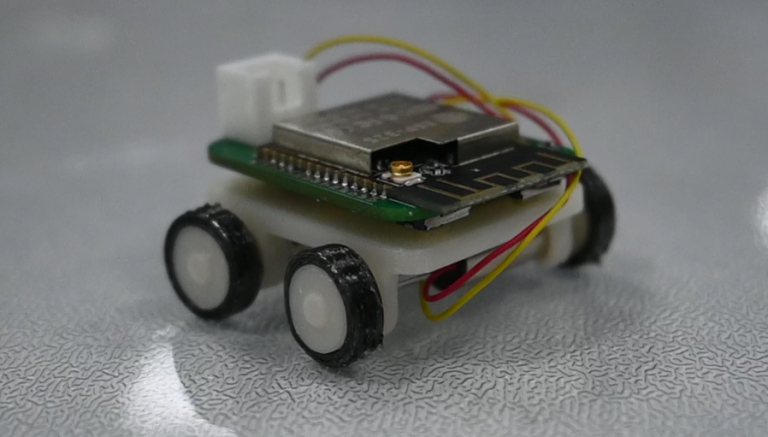
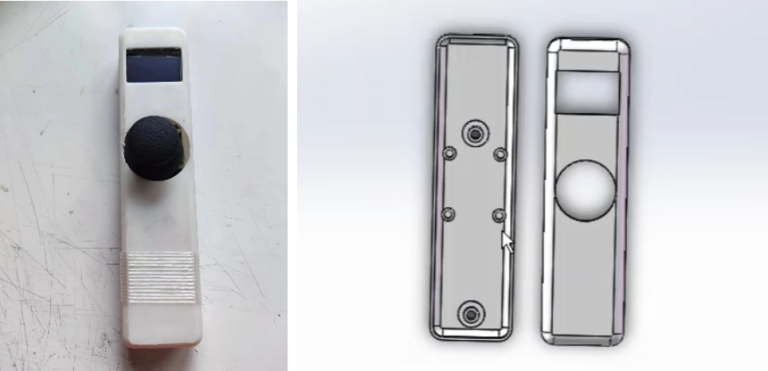
25 8 月 2024 engineeringlab06 0 评论 Elementor #348 esp32智能车系列3(mini款) Mini版本是在原有标准版的基础上重新绘制了驱动板,从而尽可能减小体积,但你就意味着无法使用摄像录制的功能。核心处理器依然采用一块儿esp 32S,通过两路电机驱动芯片进行控制机运转。相比较标准版本两块儿板子的叠加体积有明显的下降。Mini版本的设计核心主要集中在了电路板的设计上。因为为了尽可能缩小小车的体积,所以尽可能减小车驱动板成为了核心任务,最后将板子大小减小到长为3cm,宽为2.5cm的这样的一个体积上。过小的体积导致两层导线无法连接全部的串口,所以就只能进行更复杂的四层板的设计思路进行设计了。 3×2.5的这样的一个尺寸,基本上就是卡在esp32芯片的封装模组的最小尺寸来设计的。那很多人可能就好奇,它的核心功能就是移动所用到的串口数量以及算力并不是很大,为什么不使用封装体积更小,价格更便宜的esp8266或者说是AVR芯片。主要原因是因为这款主板不仅仅是为mini版本的小车而设计的,更多的是在未来用于进行二次开发,用于一个微型机器人移动平台的而设计的,比如说作为一个管道机器人的主板,这样的话后期会连接更多的外设。所以esp32丰富的外接串口以及强大的算力让这款板子拥有比较高的扩展能力,在后期的使用场景也会更加广泛。 这款小车的结构硬件因为不是项目的核心内容,所以设计更为简洁。3D打印车轮以及车体框架。车轴使用2.5mm的钢轴,如果固定不牢固的话,也可以使用轴套在末端的连接处固定一下。嗯,因为车框架和车轮的体积都比较小。FM 3D打印的精度可能会不够用,组装时的一个契合度也不会很高。当时需要大量的打磨以及用胶进行粘接,尤其是车轮与车体之间的连接部分。而且很容易造成车轴与车轮的中心不在一条直线上。导致小车运行起来会有比较大的一个抖动。所以这部分还是建议使用光固化的打印方式。 这个版本的小车在电机的选择上面就不能再使用n20减速电机了,因为它的体积相对来说比较大。很难融入到这么小的车身内,所以在这款车上我使用的是一个比较小的空心杯电机,但一般这种空心杯电机转速都特别高,一般都在3000转左右,所以还是需要搭配一个微型的减速箱才能使用。具体使用多少的一个减速比可以根据大家的需求所定。 小车的控制方式也是还有两个,一个就是使用遥控器,第二个就是使用手机上的APP控制。这两个控制方式的程序结构和标准版的基本是一样的,只是删减了视频摄像这部分的代码。 项目的全部内容我也都放到了下面链接中,大家可以点击下载。 下载资料
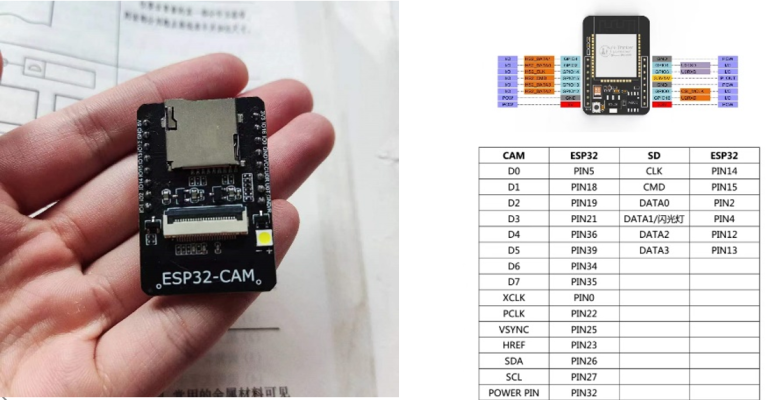
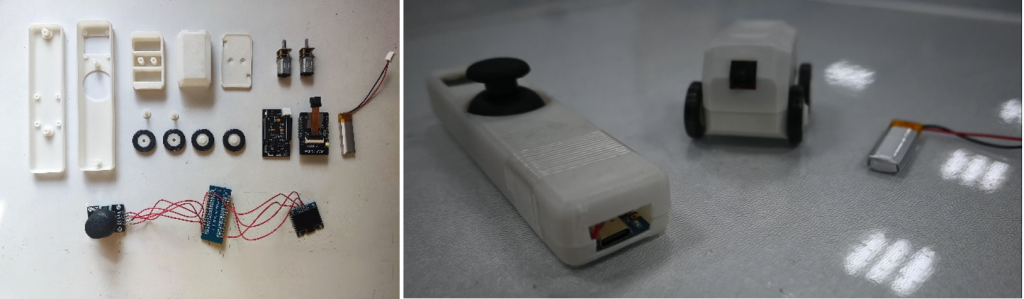
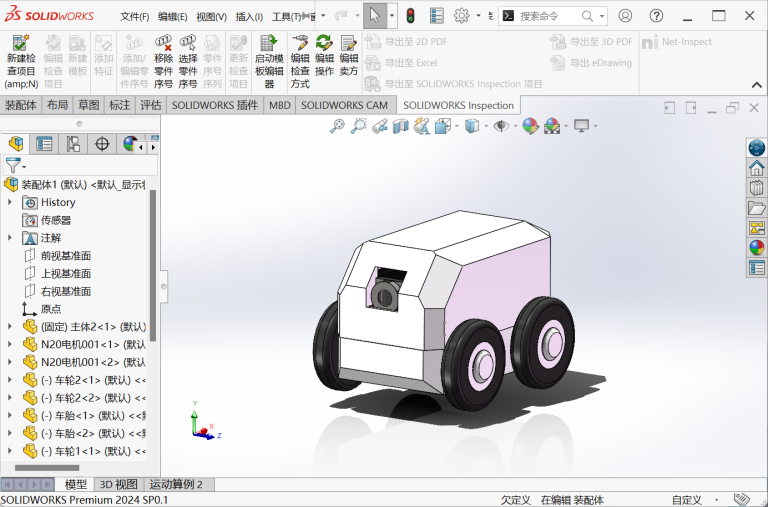
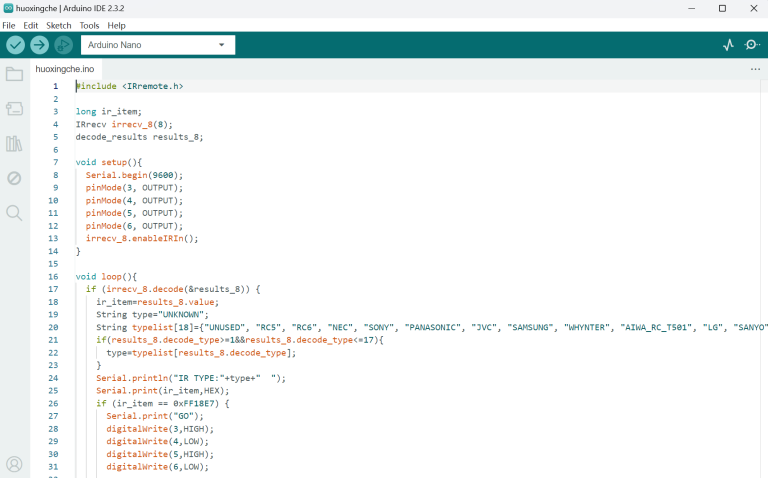
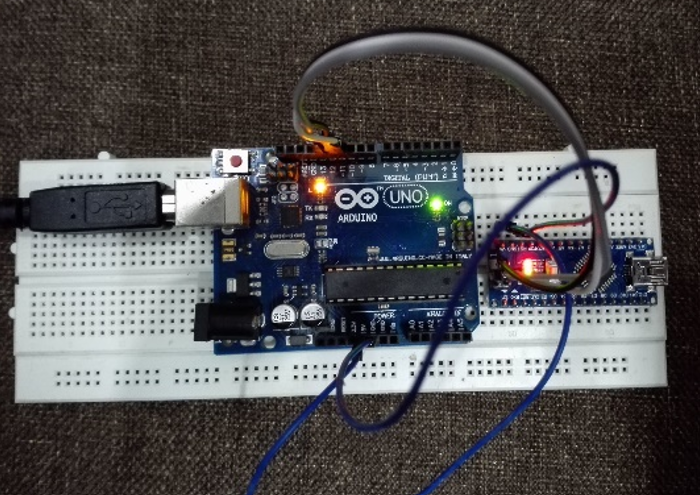
23 7 月 2024 engineeringlab06 0 评论 esp小车2 esp32智能车系列2(基础款) 首先在制作esp32智能车基础款前我们一定要先要确定项目的目标与目的,我对智能小车要求并不高,他只要能正常的进行全方位的行动。并且能进行一个实时的视频反馈就足够了。所以在小车硬件部分核心开发板上ESP32-CAM成为了首选,安信可(Ai-Thinker)公司开发的ESP32-CAM开发板集成了ESP32S处理器模组和200万像素摄像头模组,低功耗双核32位CPU,内置 520 KB SRAM,外置8MB PSRAM,支持WiFi和蓝牙连接。同时还支持影像识别等多种AI处理模式,便于未来功能的拓展。尽管许多人反映传输过来的视频质量稍显模糊,但考虑到这款开发板仅售20多块钱的价格,其实已经相当实惠了。即使在使用过程中因为烧录等原因出现损坏,也不会让人感到心疼。因此,这款开发板确实成为了学习互联网嵌入式开发入门的首选工具之一。如果想要了解开发版的一个具体情况,大家可以点击下面链接进去查看。https://docs.ai-thinker.com/esp32-cam 在选择完核心开发板之后,下一步是考虑如何为小车选择适当的动力源,即需要确定采用哪种类型的电机来为小车提供动力。基于过往的经验和了解,我首先锁定了每分100转的N20减速电机(N20电机有很多种减速比的子型号,我手边有的就是100转。大家也根据自己对小车速度快慢的要求选取其他不同减数比的电机)。这款电机转速适中,拥有出色的转矩,而且它只需要3.3V的电压即可驱动,这与ESP32-CAM开发板的供电电压吻合,可以省去额外的降压或升压模块。电机与板子共用一个电源。 通过两颗电机并列式地分别驱动小车斜对角的两个轮子,就可以赋予小车转向和前进两个方向的自由移动能力。 但如果想用Esp 32 cam上的io口控制减速电机还需要驱动芯片,所以我就又画了一个扩展板,扩展板上面结合了一块ams1117稳压芯片以及2路L9110电机驱动芯片(这款电机驱动芯片的控制操作相当简便,只需调整两个IO口的高低电平输出,即可轻松控制电机的运转。然而,它并不直接支持电机调速功能。)扩展板并且可以用排针直插的方式与esp32 cam连接。再板子给配一块3.7v 200mAh的锂电。 最后再进行车体设计,画一个车壳。我偏爱简约的设计风格,并热衷于将每个细节做到极致的压缩。因此,在设计这款小车时,我并未将车体设计得过于庞大,而是尽可能地贴合开发板、电机以及摄像头的尺寸,确保每个部分都达到最小的占用空间。整体上看,小车呈现出方方正正的外观,显得有点儿不大聪明。那这一部分的设计都用到了Solidworks三维绘图软件。想了解如何学习进行此类的结构硬件设计,三维建模。可以点击下方链接。 点击这里 小车的主体部分就已经完成了,其实这时候绝大部分人都开始进行上位机的制作或者说是软件方面的一个设计(绝大部分项目是做一个手机端的APP,上面有视频回传窗,虚拟摇杆或按钮控制小车移动。那当然我也利用APP inventor设计了一个APP用于控制小车,后文会聊到)。但我算是一个实体党,其实并不太喜欢那种虚拟摇杆儿的控制手感,所以我就又设计了一个小型的三通道遥控器。给硬件制作部分又加了一步。这个三通道的实体摇杆儿遥控器,mcu采用的是esp32C3,支持WiFi和蓝牙连接,并拥有很强大的功能拓展能力,之后又连接一个小的OLED显示屏显示一些基础的控制信息(采用iic通讯的显示屏)。 那现在基础款的全部硬件就已经全部设计完了。最后给大家看一下散件图以及成品图。 程序控制上设计了两个方案。一个是比较常见的用手机上的APP进行控制。另一个就是用之前硬件制作出来的遥控器进行控制。我们先来讲一下这个项目比较有特点的控制方式,用遥控器控制的一个设计思路。小车自身的一个运动上的控制其实非常简单。只需要通过调整两个电机的2组一共4个io口的高低电平就可以调整小车运动或停止,一颗电机的两个管脚中,一个为高电平而另一个为低电平时,电机将开始转动。若这两个管脚的电平状态发生改变(即一个由高变低,另一个由低变高),电机的转动方向也会随之改变。若两个管脚的电平状态相同(均为高电平或低电平),则电机将停止转动。这样的话,两个电机同时正转小车前进,同时倒转小车后退。一个电机正转,一个反转就可以实现小车的左右转弯。而软件上最关键的一部分在于我们如何将控制命令有效地发送给小车。这就涉及到了如何选用一个合适的通讯协议来确保遥控器与小车之间能够稳定、高效地取得联系。我在这里运用的是espnow通讯协议。这种协议使小车主板上的esp32Cam与实体遥控器上的esp32c3建立起Now低功耗双向通讯,从而精准控制小车的运动。而在小车的采集画面的实时传输方面,我采用了WiFi技术。通过构建一个局域网络,esp32cam的视频流能够发送至路由器,随后手机客户端进入这个局域网络,获取视频流,实现实时的视频观察。这样的设计不仅提升了传输效率,还确保了画面的清晰度和流畅性。当然这些程序也全部都是在arduino开发环境中完成的。 第二种方案使用APP控制。通讯模式采用的是WiFi下的UDR通讯,APP的一个开发与制作以及这种通讯技术的使用的详细内容我会放在Esp 32智能车系列3(Pro max版)中详细介绍。 下载资料
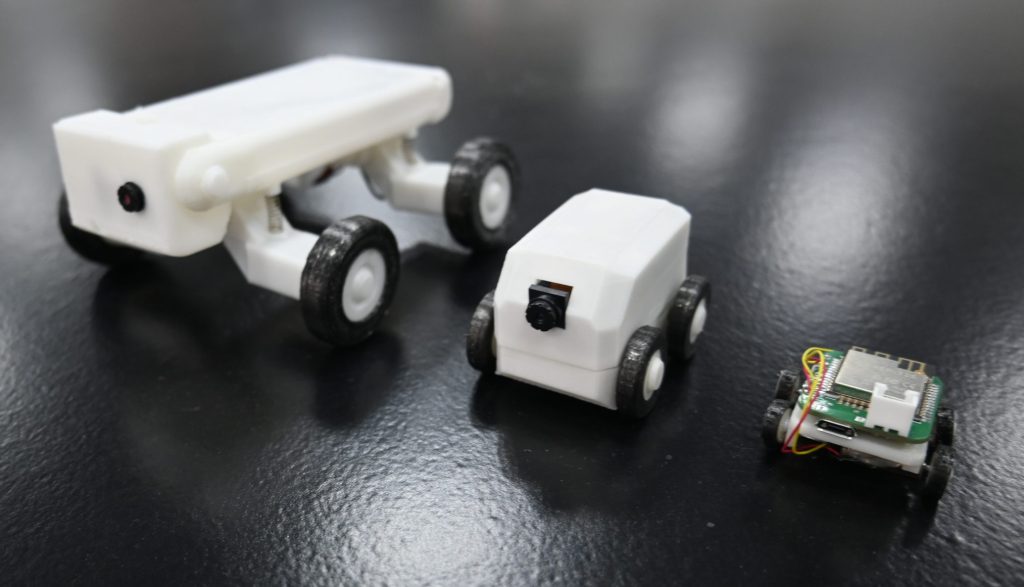
21 6 月 2024 engineeringlab06 0 评论 esp32智能车系列1(项目概要) esp32智能车系列1(项目概要) Home 基于单片机开发的智能小车一直都是嵌入式开发或者说是机器人初学者的首选项目。那你是否也想拥有一个桌面级的智能小车呢,那从今天开始我将手把手带你制作一系列三款智能小车。全部内容我将会分四期分享给大家,持续时间为两个月。 esp32智能小车系列硬件开发,3个车型组成。基础款可由app或手柄控制,可回传视频图像,适合作为初学者。mini版本在功能不变的同时拥有更小的体积, 更适合作为迷你机器人二次开发使用,promax版是标准版的全面升级,提升至四驱动,加装悬挂,独立视频外理芯片,可进避障,巡线。适合深度学习使用。 关于Esp 32小车项目,我想与大家分享的是,这是一个侧重于学习的项目,旨在为初学者提供一个工科入门的实践体验。由于我对此开源项目的设计完成度很高,即使您没有深厚的工科背景,也能轻松参与并完成。具体而言,您只需下载相关的学习资料,购买必要的器材,接着通过专业厂商打印PCB板,使用3D打印技术制作车壳,并进行简单的组装。之后,将现成的程序烧录到设备中,您就能体验到项目完成后的成果,感受工科学习的乐趣。然而,如果您有志于深入这一领域,并期望未来能在这一专业方向上有所建树,我建议您从基础开始,亲自参与并独立完成电路图和结构图纸的绘制。我发布的内容可以作为您学习的参考,但更重要的是,您应该在此基础上进行探索、改进和创新。这样,您不仅能获得工科学习的实践经验,还能培养独立思考和解决问题的能力。接下来,我将详细介绍通过参与这个项目,您可以获得哪些的知识和技能。 首先,在结构硬件设计方面,您将掌握使用SolidWorks进行三维绘图的基本技巧,这将是未来工科学习中不可或缺的一项技能。 其次,在电路硬件方面,您将学会使用Ultium Designer进行简单的电路绘制,并深入了解PCB的制作工艺、加工方式和流程以及学会白嫖宇宙无敌的“嘉立创″PCB免费打样。 在编程部分,将会学习到最入门的单片机arduino的相关知识,以及在arduino开发环境下的嵌入式开发,掌握一点的c与c++。(其实并不太准确,arduino开发环境下的语言是c++的一个子集。) 此外,您还将学习到电机、微机和模拟电路等相关知识,这些知识将帮助您更全面地理解电子系统的工作原理和设计方法。总的来说,通过参与这个项目,您将接触到未来工科学习中所需的多种工具性软件和知识。这些技能将为您的工科学习之路提供坚实的支持。 所以在项目正式开始之前大家可以先提前把这些常用的工具性软件下载下来。尽可能的了解学习一下,使接下来的项目上手更加容易。为项目的正式开始做好充足的准备。