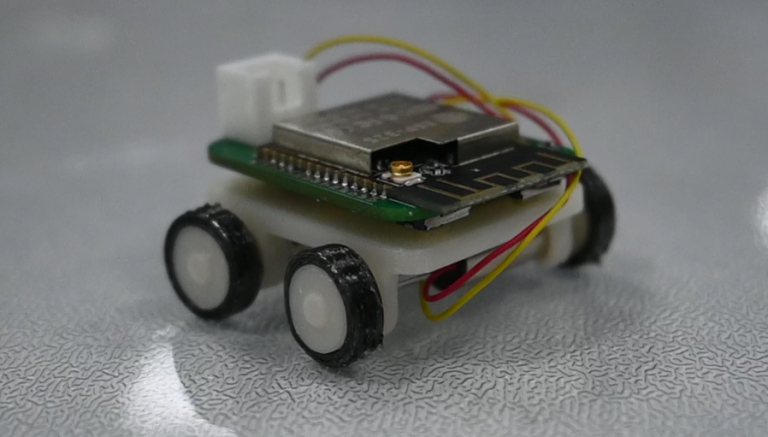
Mini版本是在原有标准版的基础上重新绘制了驱动板,从而尽可能减小体积,但你就意味着无法使用摄像录制的功能。核心处理器依然采用一块儿esp 32S,通过两路电机驱动芯片进行控制机运转。相比较标准版本两块儿板子的叠加体积有明显的下降。
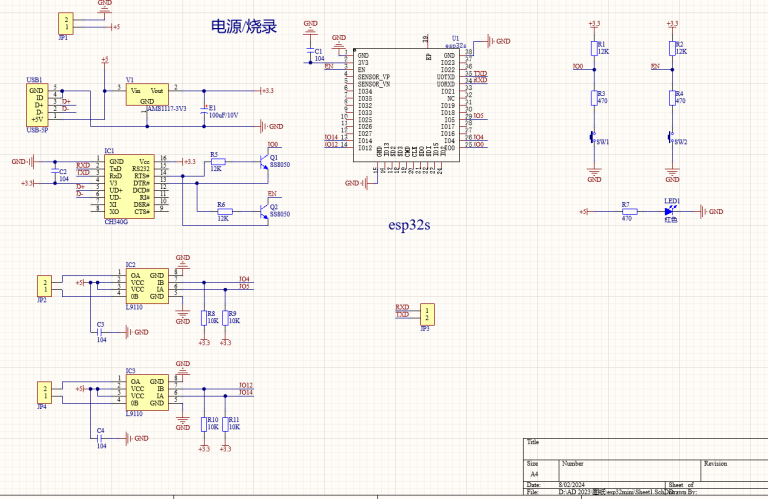
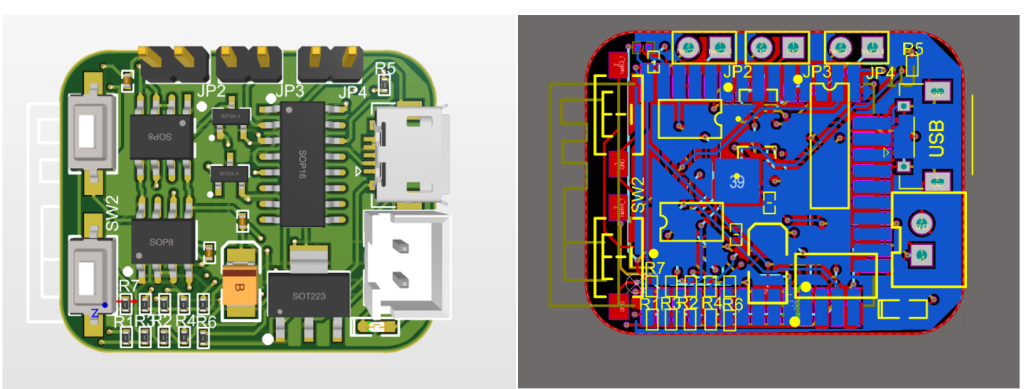
Mini版本的设计核心主要集中在了电路板的设计上。因为为了尽可能缩小小车的体积,所以尽可能减小车驱动板成为了核心任务,最后将板子大小减小到长为3cm,宽为2.5cm的这样的一个体积上。过小的体积导致两层导线无法连接全部的串口,所以就只能进行更复杂的四层板的设计思路进行设计了。
3×2.5的这样的一个尺寸,基本上就是卡在esp32芯片的封装模组的最小尺寸来设计的。那很多人可能就好奇,它的核心功能就是移动所用到的串口数量以及算力并不是很大,为什么不使用封装体积更小,价格更便宜的esp8266或者说是AVR芯片。主要原因是因为这款主板不仅仅是为mini版本的小车而设计的,更多的是在未来用于进行二次开发,用于一个微型机器人移动平台的而设计的,比如说作为一个管道机器人的主板,这样的话后期会连接更多的外设。所以esp32丰富的外接串口以及强大的算力让这款板子拥有比较高的扩展能力,在后期的使用场景也会更加广泛。
这款小车的结构硬件因为不是项目的核心内容,所以设计更为简洁。3D打印车轮以及车体框架。车轴使用2.5mm的钢轴,如果固定不牢固的话,也可以使用轴套在末端的连接处固定一下。嗯,因为车框架和车轮的体积都比较小。FM 3D打印的精度可能会不够用,组装时的一个契合度也不会很高。当时需要大量的打磨以及用胶进行粘接,尤其是车轮与车体之间的连接部分。而且很容易造成车轴与车轮的中心不在一条直线上。导致小车运行起来会有比较大的一个抖动。所以这部分还是建议使用光固化的打印方式。
这个版本的小车在电机的选择上面就不能再使用n20减速电机了,因为它的体积相对来说比较大。很难融入到这么小的车身内,所以在这款车上我使用的是一个比较小的空心杯电机,但一般这种空心杯电机转速都特别高,一般都在3000转左右,所以还是需要搭配一个微型的减速箱才能使用。具体使用多少的一个减速比可以根据大家的需求所定。
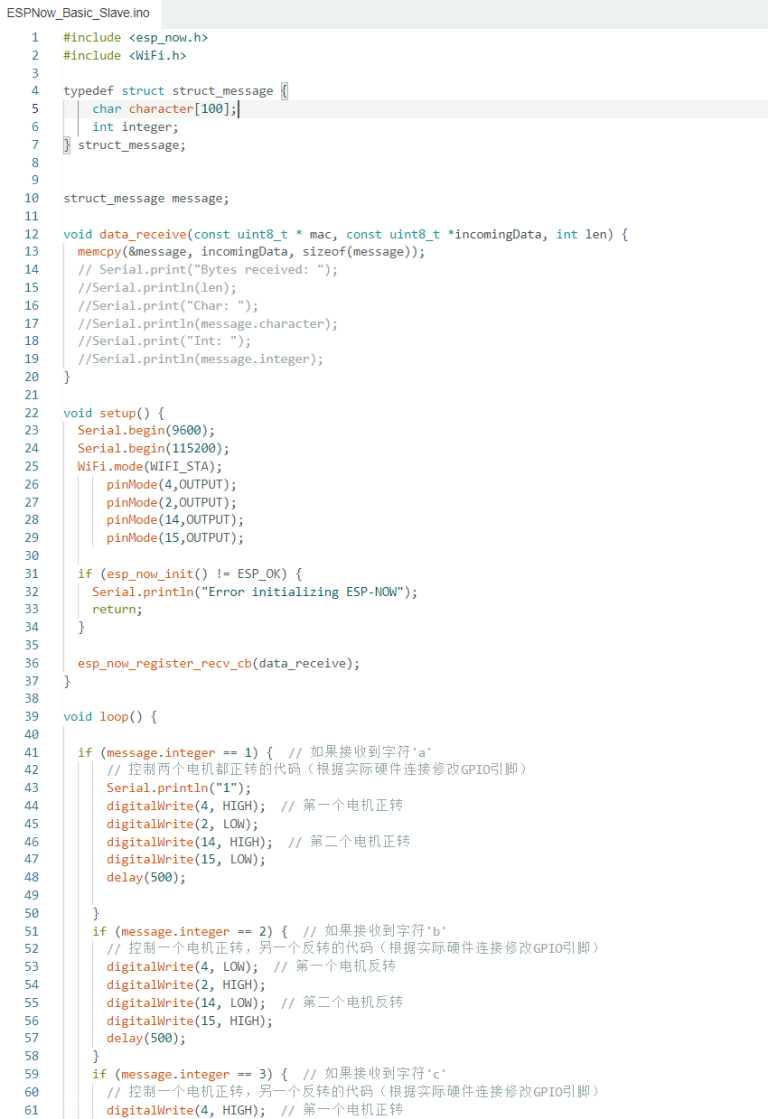
小车的控制方式也是还有两个,一个就是使用遥控器,第二个就是使用手机上的APP控制。这两个控制方式的程序结构和标准版的基本是一样的,只是删减了视频摄像这部分的代码。
项目的全部内容我也都放到了下面链接中,大家可以点击下载。